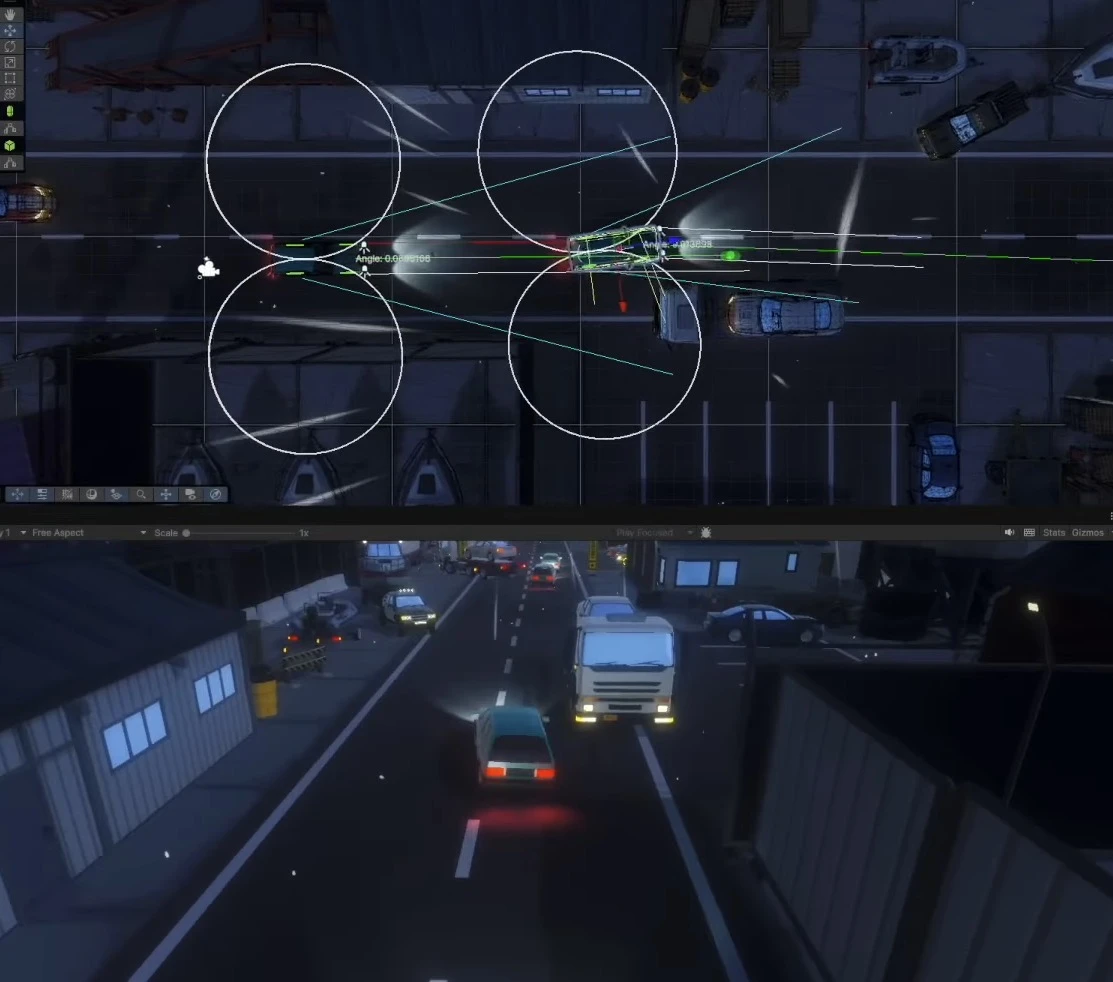
Разработчик Prototype Everything показал рабочую систему автопилота в Unity, которая заставляет автомобиль корректно поворачивать к заданной точке с учетом геометрии рулевого управления по принципу Аккермана. Суть в том, что передние колеса берут разные углы поворота, поэтому сцепление не срывается и траектория получается предсказуемой.
Ключевой прием прост. Сначала код проверяет, достижима ли целевая точка одним лишь рулением. Если цель попадает внутрь минимального круга разворота, чистым поворотом ее взять нельзя. Пока не произойдет внешнее вмешательство вроде заноса, столкновения или толчка, машина туда не доберется.
Решение закладывается в логику движения. Когда цель оказывается в недостижимой зоне, автопилот автоматически включает задний ход, выворачивает колеса в противоположную сторону и вытягивает целевую точку за пределы круга разворота. Как только точка уходит наружу, режим снова переключается на обычное движение вперед и автомобиль стабильно берет курс на цель.
Вся логика написана на C Sharp и оттестирована в Unity на URP с реальной физикой, векторной математикой и собственными алгоритмами руления. Больше примеров и разборов у автора можно найти на его YouTube и в Reddit.
Комментарии (2)